From ASTER satellite data it is possible to derive indices related to surficial mineralogical assemblages at the Earth surface (Gupta, 2017 and references within). Since ASTER cell size is 30 m in SWIR and 90 m in TIR (Gupta, 2017), the provided spatial resolution is just medium, not high.
A preliminary version of 'res', a still in-progress QGIS plugin, is here presented. It allows to automatically calculate a set of ASTER ratio indices, as discussed in Gupta (2017, cf. Table 19.3), that are useful for mineralogical identification:
1. Ferric Iron Index (Rowan and Mars 2003): higher values -> greater amount of ferric iron
2. Ferrous iron index (Rowan et al., 2005)
3. Gossan index (Velosky et al., 2003): indicates the presence of highly ferruginous rocks, deriving from the alteration of sulfides (https://www.sciencedirect.com/topics/earth-and-planetary-sciences/gossan)
4. Generalized hydroxyl alteration
5. Propylitic Index (Rowan et al., 2005) -> mafic-ultramafic suite of rocks
6. Phyllic index. Three versions presented: a) Rowan and Mars (2003); b) Rowan et al. (2005); c) Ninomiya (2003a)
7. Argillic index. Two versions: Mars and Rowan (2006), Ninomiya (2003a)
8. Calcite index. Two versions: Rowan and Mars (2003), Ninomiya (2003b)
9. Quartz index. Two versions: Ninomiya et al. (2005), Rockwell and Hofstra (2008)
10. Silica index. Two versions: Ninomiya and Fu (2002), Rowan et al. (2006)
11. Carbonate index. Ninomiya and Fu (2002)
12. Mafic index and MI corrected. Ninomiya et al. (2005), Ninomiya et al. (2005)
13. Ultramafic index. Rowan et al. (2005)
Case study: data from Niger
A very basic example from Niger is presented here. Arid deserts are an ideal setting for superficial geology investigations, thanks to the aridity and the limited presence of vegetation.
Unfortunately I do not found a reliable lithological surface map, to be used to ground-control the results. If anyone is able to point me to a freely-available lithological/mineralogical map of this zone I will be grateful.
This example has no atmospheric correction and there are some clouds in the scene. The calculated indices are distorted by image features such as clouds.
The first step is the definition of the input data source, by choosing the directory where the ASTER bands are stored (Fig. 1). The available band list is automatically filled.
 |
| Fig. 1. Input definition window. |
|
After defining the input data sources, we define the indices to be calculated (Fig. 2).
 |
Fig. 2. Choice of indices to calculate.
|
We store the calculated indices, plus a natural color composite image, into a specific folder (Fig. 3).
 |
Fig. 3. Definition of output folder. The log window is not yet populated.
|
Note that the log form currently does not display anything.
Now we view some results within QGIS, using as a basemap the Google Earth composite (Fig. 4). As previously said, the area is desertic, with very limited vegetation.
 |
Fig. 4. The studied zone in Niger (Africa). Scene borders in white.
|
The composite 3N-2-1 from Aster data is automatically computed by the plug-in (Fig. 5).
 |
Fig. 5. ASTER composite 3N-2-1 with stretched pixel values.
|
ASTER ratio indices
Clouds are masked in the images below. All indices maps with useful results are presented applying a 2.0 standard deviation stretch.
Some bands maps are more speckled and/or with stripes (e.g., for the mafic- and ultramafic indices, Figs. 11-13, 16), due to noise possibly amplified in the index calculations, or with better spatial resolution (e.g., the gossan index, Fig. 8), due to the greater spatial resolution of involved original bands.
In general, all different versions of a specific mineralogical index produce results that are consistent with each other.
Iron-related indices
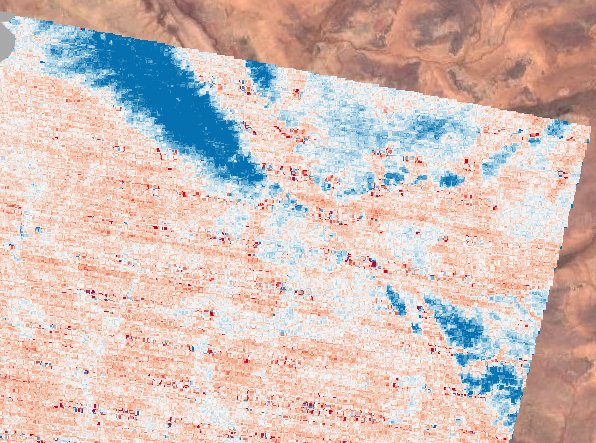
Both iron indices suggest a higher iron content in the northern region, particularly in the most northern parts (Figs. 6, 7).
Ferrous iron index map
 |
| Fig. 6. Ferrous iron index map. |
Ferric iron index map
 |
| Fig. 7. Ferric iron index map. |
Gossan index
High Gossan index values, that suggest the presence of highly ferruginous rocks deriving from sulfide minerals alteration, are clearly correlated with red/dark red zones in the composite image (cf. Fig. 8 with 5). Generally high gossan index values are distributed in elongated strings, possibly corresponding to topographic slopes. They are mainly located in the eastern sector, particularly in its central part.
 |
| Fig. 8. Gossan index map. |
Silica indices
The silica index is generally low in the scene region, apart from a major NW-SE elongated positive anomaly in the northern extreme of the scene, and a diffuse positive anomaly in the southermost part of the scene (Figs. 9, 10).
The NW-SE structure will also be notable in the mafic and ultramafic indices bands, with a reversed role (i.e., a negative anomaly, cf. Figs. 11-13 and 16, 17).
Silica index - Ninomiya and Fu (2002)
 |
Fig. 9. Silica index (Ninomiya and Fu, 2002) map.
|
Silica index - Rowan et al. (2006)
 |
Fig. 10. Silica index (Rowan et al., 2006) map.
|
|
Mafic indices
The mafic indices mirror the silica indices: high silica indices zones correspond to low mafic indices zone and viceversa (Figs. 11, 12).
The northernmost NW-SE anomaly is negative, so that the outcrops could be high in silica and low in mafic minerals.
Mafic index - Ninomiya et al. (2005)
 |
| Fig. 11. Mafic index (Ninomiya et al., 2005) map. |
Corrected mafic index - Ninomiya et al. (2005)
 |
| Fig. 12. Corrected mafic index (Ninomiya et al., 2005) map. |
Ultramafic index
The ultramafic index map presents the previously described negative anomaly in the northernmost part, as well as less intense negative anomalies in the southern part of the scene (Fig. 13).
Based on the silica, mafic and ultramafic indices, and also on the morphology in the composite ASTER image (Fig. 5), this northern structure could correspond to an outcrop of quartz sandstones, eventually forming a SE-dipping antiform, given the fan-shaped form of the anomaly.
 |
| Fig. 13. Ultramafic index map. |
Filtering of results
The results, particularly for some indices (for instance, the ultramafic index) can be speckled. To help improve the situation, a filter tool, in particular, a median filter, has been added that can be applied to computed bands.
The input and output folders are defined in the 'Input/Output' tab of the 'Image Filters' plug-in sub-module (Fig. 14).
 |
| Fig. 14. Filtering I/O definition window. |
The kernel size is defined in the 'Filters' tab (Fig. 15).
 |
| Fig. 15. Median filtering definition window. |
In Figs. 16 and 17 we compare the original ultramafic index band with the filtered one: the resulting band is less speckled, even if the spatial resolution obviously do not improve.
 |
Fig. 16. Northernmost part of the scene - original ultramafic index map.
|
|
 |
| Fig. 17. Northernmost part of the scene - ultramafic index map filtered with a 5x5 kernel. |
Plug-in status
The 'res' plug-in is still in preparations, even if it should produce valid results in the majority of the cases. In particular, the help is still to be written. Additionally, not all calculated index bands are useful, since a few index bands consist of constant grid values. This problem has to be better investigated.
The plugin current version is 0.2. It can be downloaded as a zip file from:
Afterwards the zip file can be loaded into QGIS from the QGIS plugin loader.
References
Mars J.C., Rowan L.C., 2006. Regional mapping of phyllic- and argillic-altered rocks in the Zagros magmatic arc, Iran, using Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER) data and logical operator algorithms. Geosphere 2 (3), 161–186.
Ninomiya Y., 2003. Rock type mapping with indices defined for multispectral thermal infrared ASTER data: case studies. Proc SPIE 4886, 123–132.
Ninomiya Y., 2003. A stabilized vegetation index and several mineralogic indices defined for ASTER VNIR and SWIR data. In: Proceedings international geoscience and remote sensing symposium (IGARSS-2003) (IEEE) 1294172. doi:10.1109/ IGARSS.2003.1294172.
Ninomiya Y., Fu B., 2002. Mapping quartz, carbonate minerals and mafic–ultramafic rocks using remotely sensed multispectral thermal infrared ASTER data. Proc SPIE 4710, 191–202.
Ninomiya Y., Fu B., Cudahy T.J., 2005. Detecting lithology with advanced spaceborne thermal emission and reflection radiometer (ASTER) multispectral thermal infrared “radiance-at-sensor” data. Remote Sens Environ 99, 127–139.
Gupta, R.P., 2017. Remote Sensing Geology. Springer, Third Edition.
Rockwell B.W., Hofstra A.H., 2008. Identification of quartz and carbonate minerals across northern Nevada using ASTER thermal infrared emissivity data, implications for geologic mapping and mineral resource investigations in well-studied and frontier areas. Geosphere 4(1), 218–246.
Rowan L.C., Mars J.C., 2003. Lithologic mapping in the Mountain Pass, California area using advanced spaceborne thermal emission and reflection radiometer (ASTER) data. Remote Sens. Environ. 84, 350–366.
Rowan L.C., Mars J.C., Simpson C.J., 2005. Lithologic mapping of the Mordor N.T., Australia ultramafic complex by using the advanced spaceborne thermal emission and reflection radiometer (ASTER). Remote Sens. Environ 99, 105–126.
Rowan L.C., Schmidt R.G., Mars J.C., 2006. Distribution of hydrothermally altered rocks in the Reko Diq, Pakistan, mineralized area based on spectral analysis of ASTER data. Remote Sens. Environ. 104, 74–87.
Velosky J.C., Stern R.J., Johnson P.R., 2003. Geological control of massive sulfide mineralization in the Neoproterozoic Wadi Bidah shear zone, southwestern Saudi Arabia, inferences from orbital remote sensing and field studies. Precambr. Res. 123 (2–4), 235–247.










































{kind=link}